第二ほくれん丸(RORO船ワーキンググループ)未来につながる無人・自動運航技術の確立を目指して

プロジェクト概要と開発状況
コンソーシアムメンバー(2024年4月時点)
他
プロジェクト概要
川崎汽船(株)、日本無線(株)、(株)YDKテクノロジーズの3社は、既存RORO船「第二ほくれん丸(川崎近海汽船(株)※運航)」を活用して無人・自動運航機能のレトロフィットに取り組んでおります。
本取り組みの中で、本ワーキンググループの強みである安全運航・各種航海計器の研究開発の知見を活かし、これまで人間が行っていた操船行動(認知・情報整理・分析・計画・実行)をシステムにより実行し、運航時の危険判断は最新AI技術等を活用しながら、人間による操船行動に近い自動運航システムを開発しています。本ワーキンググループでは、これからの取り組みを通じて、日本の内航業界における労働力不足解消や労務負担軽減、海難事故防止、離島航路維持等の社会課題への解決に向け、日本財団・DFFAS+参加各社・国内の協力組織と共にMEGURI2040における活動を推進して参ります。
- ※ 川崎汽船の子会社
開発状況(2024年4月現在)
本ワーキンググループで開発中の自動運航システムは、これまで人間が行っていた操船行動(認知・情報整理・分析・計画・実行)を最新AI技術等の活用及びレトロフィットによる実現をメインコンセプトとしています。このコンセプトを達成すべく、まずは避航航路を自動生成し、自動航行を実現するために、各構成システムの基本設計、構成システム間のリスク分析、操船シミュレータを用いたシステム全体の仕上がり確認等を行って参りました。
そして、2023年10月には、本システムを実証船である総トン数11,413トンの大型RORO船「第二ほくれん丸」に搭載し、日立港と釧路港間往復約1,600kmの航路において、3航海に亘り海上での実証実験を実施、営業航海の中で成功させました。
現在は実証実験の結果を分析し、システムの機能をさらに向上させるべく開発を継続しています。

開発のポイント
本ワーキンググループが第一弾として開発した自動運航システムは、AISや船舶レーダーで捕捉できない物標、航路上の潜在的リスクを可視化、避航時のルート提案及び操船者の承認による自動避航操舵を可能とし、操船者の一連の行動を支援することができ、以下5つのサブシステムにより構成させました。
- ステータス管理部:システムを構成する各サブシステムの状態・アラートを受信し、システム全体のステータスを分析する役割を担います。
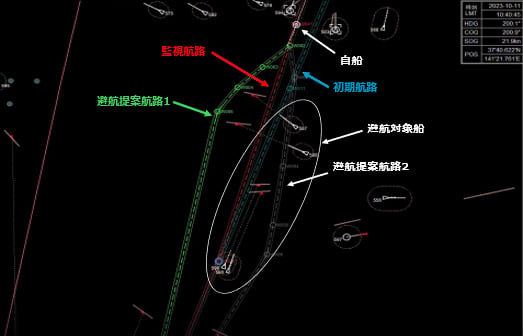
- 避航ルート生成部:自船と他船の位置・針路・速力データを基に衝突リスクを常に監視。衝突の恐れを検知した場合は、2種類の避航ルートを生成し提案します。
- センサーフュージョン部:周囲のTT情報、AIS情報、AI画像認識部による物標情報を統合し、確度の高い物標情報を提供します。
- AI画像認識部:光学カメラ画像と赤外線カメラ画像の重ね合わせにより、昼夜を問わず周囲の物標を捕捉します。
- 見張り支援表示部:本船の航路、避航ルート生成部が提案する避航航路、周囲の物標情報を3D画面上で表示し、周囲の状況を確認できます。
以上5つのサブシステムで構成される自動運航システムを、実証船「第二ほくれん丸」に搭載、前述の通り海上実証実験を実施しました。
今後について
今後は、実証実験で得られた各種データを元に、本ワーキンググループの強みである安全運航・各種航海計器の研究開発の知見をフィードバックさせ、自動運航システムをさらにブラッシュアップして参ります。
具体的には、2025年において実施を計画中である無人運航を目指した海上実証実験に向け、これまでの研究開発の成果である船上システムの高度化に加え、自動船速制御システムの開発による出入港操船時における低速力域での本船制御及び、速力変更による避航操船機能の実現を目指し、あらゆる船種に導入ができ、かつ高い汎用性を持つ自動運航システムの開発に取り組んで参ります。
また、本船状況の常時監視や運航支援を目的としたFOC(Fleet Operation Center)と呼ぶ陸上施設を構築し、船陸でデータ連携させるための陸上システム及び船陸間通信システムの開発も進め、無人運航を実現する船陸連携技術開発と実証に取り組んで参ります。
関係者コメント
今井理人(川崎汽船株式会社 先進技術グループ 運航技術イノベーションチーム)
日本という海洋国家において、内航、外航を問わず海上輸送の重要性は言うに及びません。内航海運業界の人手不足への対応が急がれる昨今、本取り組みは、日本の海上輸送の未来を支えるために非常に重要な位置づけにあると考えています。当社は、長年に亘り培ってきた安全運航への知見を活かし、自動運航システムの開発に取り組んでいます。開発に関わっていただいた皆さんのご協力により、自動運航船の未来が少しずつ近づいてきているのを実感しております。今後も開発グループの皆さまと共に、自動運航システムによる持続的社会の実現を目指して参ります。

石井幹久(日本無線株式会社)
私は、無人運航船が他船と衝突を避けるためのルートを自動で生成するソフトウェアを開発しています。開発は、各社それぞれの個性や強みを結集して進めており、自社内で完結する製品開発では分からない”気付き”を得ることができるので面白いです。また、働き手の不足という大きな社会課題に対して、会社の垣根を越えて皆で挑めている点にやりがいを感じます。海事産業にイノベーションを起こせるよう、世界一の無人運航技術を開発していきたいです。

